Curriculum Objectives
recall and use the radial and transverse components of
acceleration for a particle moving in a circle with variable
speed;
solve problems which can be modelled by the motion of a
particle in a vertical circle without loss of energy (including
finding the tension in a string or a normal contact force,
locating points at which these are zero, and conditions for
complete circular motion).
Introduction
For a body, of mass m, in uniform motion, a constant force, F, applied in the direction of motion will accelerate the body exactly by a measure of $\frac{F}{m}\,m{s^{ - 2}}$. What we wish to achieve here is to talk about the effect forces perpendicular to the motion of a body tend to engender. As such forces wouldn't have a component in the direction of motion, the particle's speed in that direction will remain the same. The particle however will suffer a change in direction. Also note that if the force acts on the body in a direction that is some angle to the direction of motion, but not zero or 90 degree (or any multiple thereof) then, the effect of the body would be to change the direction of the body and change the speed of the body in the direction of motion.
The path the last two bodies in the above consideration will take, will be of a curved nature. We will talk here only of a special curve - the circle. The beginning of our study, as with all beginnings, will be modest. We will first talk of the simpler case of constant speed for a particle in circle, before engaging in the discussion of variable speeds.
Angular Velocity and Acceleration
Before we may embark on the sojourn planned above, we have to cover the concept of angular velocity, and acceleration.
We know by definition that a radian is the angle subtended at the centre by a sector of a segment of the circle, if the curved length of the segment is equal to its radius. Furthermore, we know for any segment, that has a curved length of s, and radius r, the angle subtended at the centre is:
$\theta =$$ \frac{s}{r}$
Most books usually quote this result without proof and I would have done so as well, until I realised, in my efforts to prove it, that it takes nothing more than you have already learnt in the course. We wish to find a relationship between the radius, angle and arc length. You should recall that we have a formula that links all three in a sense.
$S = \int_\alpha ^\beta {\sqrt {{{\left( f \right)}^2} + {{\left( {\frac{{df}}{{d\theta }}} \right)}^2}} } \,d\theta $
In polar form a circle has the following form: $f\left( \theta \right) = R$
Putting this into what we have gotten above:
$S = \int_\alpha ^\beta {\sqrt {{R^2} + {{\left( 0 \right)}^2}} } \,d\theta = R\beta - R\alpha $
Where both $\alpha$ and $\beta$ are angles measured from some fixed axis, the choice of which however is arbitrary. The only conditions we impose on the the angles are $\beta ,\alpha \ge 0$. Something of the following form:
Now if one were to set OX, as the fixed axis on the circle, where O is the centre of the circle and X a point on the circumference exactly to the right to the centre. Further if the radius is R, then we can find the arc length AB, by using the definite integral. The matter could be further simplified, if the fixed axis is set at OA. Then the arc length is simply: $A\beta $. Swap out $\beta$ with $\theta$ and you have proven the result.
Now consider the motion of a particle along a circular path. It may either move in one of two directions: clockwise or anticlockwise. For a measure of how large a displacement the particle has gone through we have two options. One is to look at the length of the curved path the particle has followed or the angle the particle has gone through. Both the measures are important. We will talk of the angular measure for displacement, however. This measure is, unsurprisingly, called the angular displacement and denoted by $\Delta \theta $ (some books prefer $\theta $). For discrete cases we have:
$\Delta \theta =$$ \frac{{\Delta s}}{r}$
Here $\Delta s$ is the displacement the particle has gone through. So we see that the displacement the particle goes through is related to the angular displacement; they are proportional.
The concept of angular velocity comes naturally, when we derive analogies from linear motion. As with (instantaneous) velocity, (instantaneous) angular velocity ($\omega $) is the time-derivative of angular displacement. The unit of angular velocity is $rad{\kern 1pt} {s^{ - 1}}$.
$\omega =$$ \frac{{d\theta }}{{dt}}$
Angular acceleration is derived similarly, and is denoted by $\alpha$.
$\alpha =$$ \frac{{d\omega }}{{dt}} = \frac{{{d^2}\theta }}{{d{t^2}}}$
Of course one could use these differential equations to derive the constant acceleration kinematics you should have mastered by now. For example:
$\alpha = \frac{{d\omega }}{{dt}} \Rightarrow \int {\alpha \cdot dt} = \int {d\omega } $
Assuming that the angular acceleration is constant:
$\begin{array}{l}
\alpha = \frac{{d\omega }}{{dt}} \Rightarrow \int {a \cdot dt} = \int {d\omega } \\
\alpha \int {dt} = \int {d\omega } \\
\alpha t + {\omega _0} = \omega
\end{array}$
Note that ${\omega _0}$ is simply the constant of integration. If we let t equal zero, we find that the constant in this case is the initial angular velocity. Of course ${\omega _0}$ denotes the very same. This is the rotational analogue of the linear one: $v = {v_0} + at$
In the same vein, all the SUVAT equations that you should have learned already, are naturally extended to the rotational case by the simple substitution of the angular acceleration, velocity and displacement for the usual linear quantities. I state them below as a quick reference.
$\begin{array}{l}
\omega = {\omega _0} + \alpha t\\
\theta = {\theta _0} + {\omega _0}t + {\textstyle{1 \over 2}}\alpha {t^2}\\
\theta = {\theta _0} + {\textstyle{1 \over 2}}\left( {{\omega _0} + \omega } \right)t\\
{\omega ^2} = {\omega _0}^2 - 2\alpha \left( {\Delta \theta } \right)\\
\theta = {\theta _0} + \omega t - {\textstyle{1 \over 2}}\alpha {t^2}
\end{array}$
Here $\omega $ represents the final angular velocity, ${\omega _0}$ represents initial velocity. $\alpha $ represents the final angular acceleration, and ${\alpha _0}$ represents the initial angular acceleration. $\theta $ represents the final angular displacement, and ${\theta _0}$ represents the initial angular displacement. $\Delta \theta = \theta - {\theta _0}$
Also note the following relationship between the transversal velocity and acceleration and rotational acceleration:
We know that:
$s = r\theta $
Then by differentiating both sides by the time (twice for acceleration), and taking note of the fact that the radius remains constant we find the following relationship between the magnitudes of the linear or transversal velocity and acceleration and that of angular velocity and acceleration
$\begin{array}{l}
\frac{{ds}}{{dt}} = \frac{d}{{dt}}\left( {r\theta } \right) \Rightarrow \frac{{ds}}{{dt}} = r\frac{{d\theta }}{{dt}} \Rightarrow v = r\omega \\
\frac{{dv}}{{dt}} = \frac{d}{{dt}}\left( {r\omega } \right) = r\left( {\frac{{d\omega }}{{dt}}} \right) \Rightarrow a = r\alpha
\end{array}$
Motion in a circle with constant speed
Consider a particle describing a circle, with centre O, radius r, and a constant speed of v. As there is no change in the speed, no force component acts in the direction of the motion, which is tangential at any instant. A simple observation can convince you of the fact. Tie a rubber to a string and bring it into circular. Snap its chord and chart its course. At each point you shall find the rubber to move in the direction of the tangent at that point.
A force must be however acting on it because the direction is changing. The only possible candidates are directions perpendicular to the tangent at a given point. As the particle seems to be revolving around centre as opposed to moving away from it, we conclude that the force is acting towards the centre, or that it is acting along the radius. We call this radial acceleration. Memorise this term, you will be seeing that a lot.
As a general sketch of the matter, consider:
Having understood the nature of the radial acceleration, it only follows that we would look to quantify it. Let us forsake the proof at the moment (you may find it in the assortment of proofs post), we find that the magnitude of the radial acceleration is given by:
$a = \frac{{{v^2}}}{r}$
As $v = r\omega $
$a = \frac{{{v^2}}}{r} = \frac{{{r^2}{\omega ^2}}}{r} = r{\omega ^2}$
$a = \frac{{{v^2}}}{r} = v \cdot \frac{v}{r} = v\omega $
Ex.
A particle of mass m is attached by a light inextensible string of length l, to a fixed point A on a smooth horizontal surface. If it is travelling with constant angular velocity $\omega$ in a circle what is the tension in the string and the reaction in the table.
We begin with noting that that the particle is moving in horizontal circles, and that there is no vertical component to the acceleration. We may conclude that the vertical forces are in equilibrium. The vertical forces of course are the reaction and the weight. We have then:
$R = mg$
Also note that the force keeping the particle in uniform circular motion is the tension exerted by the string. We compute it by computing the radial acceleration and then applying Newton's second law. We use $a = r{\omega ^2}$ because that is the information given in the question. You could make the necessary substitutions and use any one of the equations.
Hence
$a = r{\omega ^2} = l{\omega ^2}$
$F = ma = ml{\omega ^2} = T$
For the physics students, this force is called the centripetal force.
Motion in a circle with variable speed
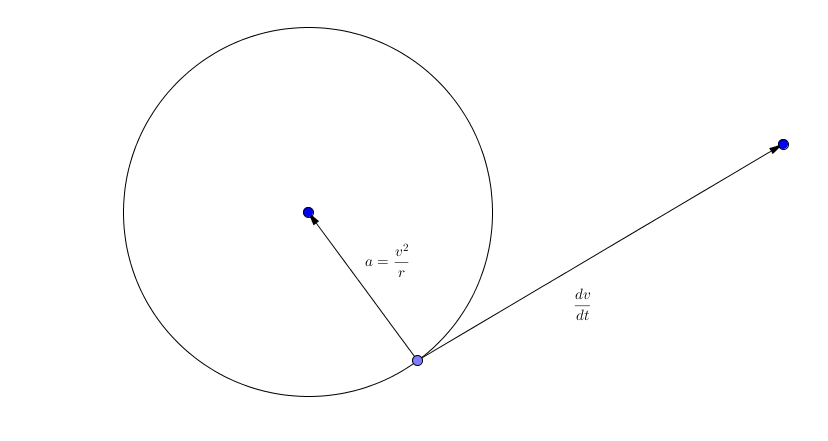
The velocity of a particle travelling on a circular path with varying speed is changing both in magnitude and direction. The particle therefore has two acceleration components:
a) towards the centre of the circle, a component which is the rate of change of direction of the velocity. The magnitude at any given moment as before is $a = \frac{{{v^2}}}{r}$. However v is variable and the acceleration therefore is also, labile. Usually in our questions the velocity will be given as a function of time or displacement.
b) in the direction of motion, i.e. along the tangent to the circle at P, a component $\frac{{dv}}{{dt}}$ which is the rate of change of the magnitude of the velocity.
Motion of this type results in the force having both a radial and tangential component. This situation arises when the particle, (and the circular path) is in a vertical plane. A general sketch of the matter is then of the form:
While motion of this form, considering how it is formed, can be fairly difficult to analyse, in our study we will be working with a particularly simplifying assumption: The velocity of the object after it has begun the motion will not be affected by any other external force except weight. In such cases the mechanical energy is conserved. Having made this assumption we shall find that these motion can be, virtually all the time, studied using three equations, that I shall generalise for you below.
Allow me to set the problem. we have a small bead of mass m, that is threaded onto a smooth wire in the shape of a circle, with radius r, and centre O. The circle is fixed in a vertical plane and the bead passes the lowest point A (the point directly downwards to the centre) on the wire with a speed of u. It subsequently passes with a speed of v through another point B where the angle BOA is $\theta$. Consider the following:
Note that R stands for the reaction force caused by the wire. By equating the transversal and radial forces we get the following equations (we need to resolve weight into the two components).
Along the radius we have:
$R - mg\cos \theta = m\frac{{{v^2}}}{r}$
Along the tangent we have:
$mg\sin \theta = - m\frac{{dv}}{{dt}}$
The maximum possible value of R occurs at A. This follows from the first equation, as cosine can at most take the value of 1, and at this value the angle that the bead makes is zero (or 360) degree(s).
The third equation we get from the conservation of energy.
u and v are the respective speeds of the body at those positions. As the total mechanical energy will be conserved, we will work out the kinetic and gravitational potential energy at both points, and compare their sums. However there is one caveat before we begin. The gravitational potential energy requires some plane of reference, whereat the gravitational potential is zero. You must be used to using the ground as the point of zero gravitational potential, in this case however there is no ground to be our reference, which forces us to decide on a different one. I have pointed out two possibilities A and B, there are of course infinitely more.
If we let B be the point of zero potential, then the total mechanical energy of the body when it has speed u is:
$ME = {\textstyle{1 \over 2}}m{u^2}$
The mechanical energy at the other point is then:
$ME = {\textstyle{1 \over 2}}m{v^2} + mgr\left( {1 - \cos \theta } \right)$
Then we can say:
${\textstyle{1 \over 2}}m{u^2} = {\textstyle{1 \over 2}}m{v^2} + mgr\left( {1 - \cos \theta } \right)$
I hope I don't have to point out why this equation would be helpful.
If we use A as the point of reference, then we will have to submit to the concept of "negative gravitational potential energy". We shall treat our negative energy as follows: for a body of mass m, at a vertical distance of a, below our zero potential line, the gravitational potential energy is $ - mga$.
Following this convention, the mechanical energy when the body has speed u is:
$ME = {\textstyle{1 \over 2}}m{u^2} - mgr$
For the other body we can say then:
$ME = {\textstyle{1 \over 2}}m{v^2} - mgr\cos \theta $
We conclude then:
${\textstyle{1 \over 2}}m{u^2} - mgr = {\textstyle{1 \over 2}}m{v^2} - mgr\cos \theta $
Use whichever you find easier, as we see regardless of the choice of the line of reference, we get equivalent equations.
The case we began studying was such that a bead was threaded on a smooth wire, however this form of analysis is valid for a variety of different yet fundamentally similar situations:
1) A particle attached to one end of a light rod which is free to rotate about a smooth fixed axis through the other end. In this case everything remains the same, however there is no reaction force involved here in its stead there is the stress in the rod. So if you were to replace R by that force, let us say F, then the equations hold here as well.
2) A particle rotating on the inside of a smooth circular surface. Here the equations can be used verbatim.
3) A particle rotating at the end of a light string whose other end is fixed. Here replace the reaction force by the tension in the string and the equations are again usable.
However there is one case that you should be aware of, whose treatment has to be adapted from what we have already established.
4) A particle that is moving on the surface of a smooth circular surface. This case is different because the reaction force here is acting away from the centre. Only weight can provide any centripetal force and that too only in the upper hemisphere. So the particle will stay in contact with top of the circle only. The case is as follows, and the equations need only be slightly modified.
The equations are then:
$mg\cos \theta - R = \frac{{m{v^2}}}{r}$
$mg\sin \theta = m\frac{{dv}}{{dt}}$
By the conservation of mechanical energy, we have:
${\textstyle{1 \over 2}}m{u^2} + mgr = {\textstyle{1 \over 2}}m{v^2} + mgr\cos \theta $
Where u is the speed of the particle directly above the centre and v at some subsequent point.
Ex.
A particle of mass 2 kg is attached to the end B of a light rod AB of length 0.8m which is free to rotate in a vertical plane about the end A. If the end B, when vertically below A, is given a horizontal velocity of 3 metres per second show that the particle will not describe complete circles. Find the angle through which it oscillates and the greatest possible stress in the rod during the motion.
Sol:
The best way to approach these question is to draw a model to study. Using the information given above we have the following:
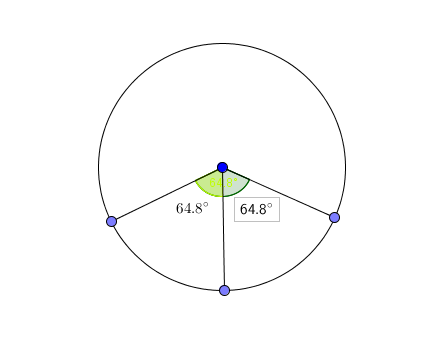
Now we apply our equations to solve the question. We wish to show that the particle doesn't describe full circle, and begins oscillating. For this it would be sufficient to show that there is a point, between the angles 0 and 180 (ask yourself why don't consider the range between 180 and 360), that the particle comes to rest. We have the initial and final velocities (3 and 0), so we should use that equation that involves both of these quantities. We have then (Note that the horizontal line where the PE is zero, passes through the origin):
${\textstyle{1 \over 2}} \cdot 2 \cdot {3^2} - 2g\left( {0.8} \right) = {\textstyle{1 \over 2}} \cdot 2 \cdot {0^2} - 2g\left( {0.8} \right)\cos \theta $
$ \Rightarrow \cos \theta = 0.425 \Rightarrow \theta = {64.8^ \circ }$
So the angle that the particle oscillates through is twice this angle. It only remains to find the maximum stress. We use the first of our equations because it involves centripetal force.
$T - 2g\cos \theta = \frac{{2 \cdot {v^2}}}{{0.8}}$
Obviously T is greatest when $\theta = {0^ \circ };v = 3$
The maximum tension then is given by: $\left( {\frac{{18}}{{0.8}} + 2g} \right)N = 42.1\,N$
Note that N is the unit not any variable.